Over the past two years we have been involved in increasingly demanding Multibody Dynamics simulations for vehicles. The work has been within the parallel framework of conception, designing and developing a production vehicle with the resulting challenge of creating and validating models, understanding the underlying dynamics behavior enough to inform critical directional decisions, without diving into details that would add diminishing value to the program at early stages. More to come…
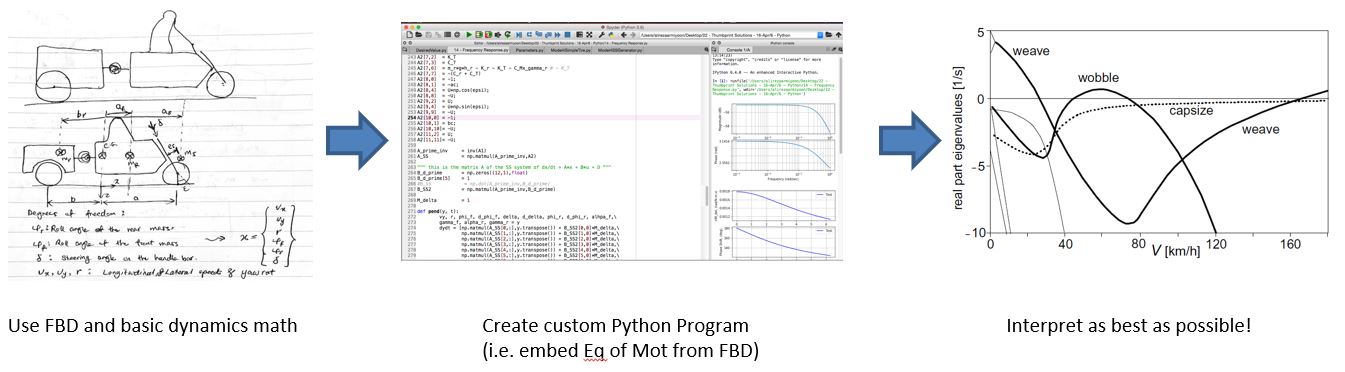
This model includes 3 masses, which the rear mass, the front mass, and the steering system. The degrees of freedom in this model are the same as Model#3 with addition of steering angle. Also, the rotational velocities of the wheels and their inertial effects have been considered in this model. It is assumed that the steering system has damping. The caster angle, \zeta, is also considered, in addition to an offset, e_s for the steering axis. These parameters will determine the caster angle and the trail in our design. The developed model is a linear model, which assumes that the angles including roll angles and steer angle are small. Also, the terms with order higher than 1 resulting from multiplication of angles have been considered insignificant, and have been eliminated. The state space form of equations has also been developed. This state space form will be used for: Simulations with low lateral accelerations Developing of controllers Eigenvalue analysis